数学月間の会SGKのURLは,https://sgk2005.org/ になりました.

数学月間の会SGKのURLは,https://sgk2005.org/ になりました.
皆さまお元気でおお過ごしでしょうか.メルマガ311,312号で取り上げましたが罹患率5~6%でした.ただし,これはPCR検査を受けた人数に対してで,一般人に対しては少し割り引いた罹患率になるでしょう.3月30日現在の東京都の延べ患者数は443人とのことです.実際は都市封鎖をしてもおかしくない事態です.
この状況はしばらく続くので,数学月間の会の活動としてのイベントがいつ実施できるか見通せません(今年も7月22日に数学月間懇話会をやる予定です),
この対策として常時情報発信ができるyoutubeチャンネル(NPO数学月間の会)を立ち上げました.
このメルマガが皆様に届く朝には,このyutubeチャンネルも(3月31日0:00)公開されていると思います.ぜひお確かめの上,問題があるかどうかご報告くださいますようお願いいたします.
私個人のインターネット環境はwifiですので通信速度が遅く,
大きな動画のuploadに時間がかかり現在まだ5つくらいです.
今後,会員皆様の関連動画も載せられるように考えますので,ご協力のほどお願いいたします.
(要旨)ーーー
3月21日の厚労省の公表値を用いて,罹患率=発症患者/PCR検査数と定義すると,罹患率は,約5%になります.
しかし,PCR検査の,感度と特異性(酒井健司,朝日デジタル)の情報を入れてベイズ推定した罹患率は5.9%になります.
この推定値の増加は,主としてPCR検査感度に原因があり,実際の罹患者を取りこぼしていたためです.
(注)この数値は,PCR検査を受けた限定されたグループをサンプルとしているために,一般の集団に対しては少し割り引いた数値になるでしょう.
======================================
■条件付き確率についての「ベイズの定理」とは次のように説明できます.
$$p(Y|X)p(X)=p(X \cap Y)=p(X|Y)p(Y)$$
記号の意味は例えば以下の様です.
$$p(X)$$ $$X$$が起こる確率
$$p(Y|X)$$ $$X$$が起こった後で$$Y$$が起こる確率
$$p(X \cap Y)$$ $$X$$かつ$$Y$$が起こる確率
ベイズの定理は,$$X$$(原因)が起きた後で$$Y$$(結果)が起きる確率$$p(Y|X)$$と,$$X$$と$$Y$$を入れ替えた確率$$p(X|Y)$$を結び付ける定理です.
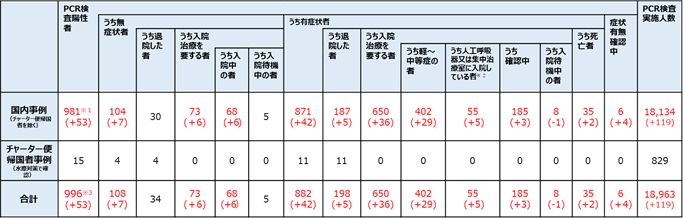
■新型コロナウイルスに対するPCR検査数は,厚生労働省の発表で,日本でも3月21日現在,18,134人になりました.
PCR検査による感染者数は1,007人,発症患者(=罹患者と定義)はそのうちの884人です.
発症患者/PCR検査数=罹患率 と仮の罹患率を定義すると,罹患率は約5%です.
陽性率=感染者数/PCR検査数=0.056 ,陰性率=0.944 も仮に定義します.
新型コロナ検査、どれくらい正確? 感度と特異度の意味査(酒井健司,朝日デジタル)をもとにして,次のように仮定します.PCR検査の感度というのは,罹患者がPCR検査で+になる確率のことで,あまり大きくなく0.7, 罹患者でもPCR検査が-となる場合(偽陰性)の確率は0.3程度だそうです.
検査の特異性により,非罹患者が+(疑陽性)と判定される確率は0.01だそうです.
*注)3月24日のメルマガに使った仮定の数値は,実際とだいぶ違いましたので,修正した以下の表に差し替えました.
$$\begin{array}{|c|c|c|}
\hline
& + & - \\[0mm]
\hline
罹患 & 0.7 & 0.3(偽陰性) \\[0mm]
\hline
非罹患 & 0.01(疑陽性) & 0.99 \\[0mm]
\hline
\end{array}$$
これらの仮定の下で,以下の2つを推定しましょう.ただし,ベイズの定理を使います.
(1)PCR検査で陽性と判定されたとき,罹患者である確率を求めなさい.
$$p(罹患|+)=\displaystyle \frac{p(+|罹患)p(罹患)}{p(+)}=\displaystyle \frac{0.7 \times 0.05}{0.05 \times 0.7+0.95 \times 0.01}=0.79$$
+(陽性)でも,検査感度のせいで罹患者をとりこぼすことが多い,非罹患者の割合が多いので偽陽性も無視できず,全体として決定率を下げている(79%).
(2)罹患率を推定しなさい.
$$ p(罹患|-)=\displaystyle \frac{p(-|罹患)p(罹患)}{p(-)}=\displaystyle \frac{0.3 \times 0.05}{0.05 \times 0.3+0.95 \times 0.99}=0.016 $$
陰性と判定されたものの中に見逃された患者である可能性は1.6%ほどある.
従って,全人口のなかで推定される罹患率は$$0.056 \times 0.79+0.944 \times 0.016=0.059$$,すなわち,5.9%と推定できる.
*注)ただし,PCR検査は限定されたグループに対してなされており,偏った集団をサンプルとしているので,全人口に対してなら少し割り引いた値が推定される.
一般の振幅
$$\left\{ \begin{array}{@{\,} c @{\, } }\displaystyle \frac{d}{dt}\displaystyle \frac{ \partial L}{ \partial \dot{\phi } }-\displaystyle \frac{ \partial L}{ \partial \phi }=0 \\[0mm]\displaystyle \frac{d}{dt}\displaystyle \frac{ \partial L}{ \partial \dot{\psi } }-\displaystyle \frac{ \partial L}{ \partial \psi }=0\end{array} \right. $$
ラグランジュ関数$$L$$は,
$$L=T-U$$
$$ T=\displaystyle \frac{m+m_{1 } }{2}l^{2}\dot{\phi }^{2}+\displaystyle \frac{m_{1 } }{2}l^{2}_{1}\dot{\psi }^{2}+m_{1}ll_{1}cos\left( \phi -\psi \right) \dot{\phi }\dot{\psi } $$
$$U=-\left( m+m_{1} \right) glcos\phi -m_{1}gl_{1}cos\psi $$
--------------------
$$\displaystyle \frac{ \partial L}{ \partial \dot{\phi } }=\left( m+m_{1} \right) l^{2}\dot{\phi }+m_{1}ll_{1}cos\left( \phi -\psi \right) \dot{\psi }$$
$$\displaystyle \frac{ \partial L}{ \partial \dot{\psi } }=m_{1}l_{1}^{2}\dot{\psi }+m_{1}ll_{1}cos\left( \phi -\psi \right) \dot{\phi }$$
$$\displaystyle \frac{ \partial L}{ \partial \phi }=-m_{1}ll_{1}\dot{\phi \psi }sin\left( \phi -\psi \right) -\left( m+m_{1} \right) glsin\phi $$
$$\displaystyle \frac{ \partial L}{ \partial \psi }=m_{1}ll_{1}\dot{\phi \psi }sin\left( \phi -\psi \right) -m_{1}gl_{1}sin\psi $$
--------------------
$$\left\{ \begin{array}{@{\,} c @{\, } }\left( m+m_{1} \right) l^{2}\ddot{\phi }+m_{1}ll_{1}cos\left( \phi -\psi \right) \ddot{\psi }-m_{1}ll_{1}\dot{\psi }sin\left( \phi -\psi \right) \left[ \dot{\phi }-\dot{\psi } \right] =-m_{1}ll_{1}\dot{\phi \psi }sin\left( \phi -\psi \right) -\left( m+m_{1} \right) glsin\phi \\[0mm]m_{1}l_{1}^{2}\ddot{\psi }+m_{1}ll_{1}cos\left( \phi -\psi \right) \ddot{\phi }-m_{1}ll_{1}\dot{\phi }sin\left( \phi -\psi \right) \left[ \dot{\phi }-\dot{\psi } \right] =m_{1}ll_{1}\dot{\phi \psi }sin\left( \phi -\psi \right) -m_{1}gl_{1}sin\psi\end{array} \right. $$
$$ \left\{ \begin{array}{@{\,} c @{\, } }\left( m+m_{1} \right) l^{2}\ddot{\phi }+m_{1}ll_{1}cos\left( \phi -\psi \right) \ddot{\psi }+m_{1}ll_{1}\dot{\psi }^{2}sin\left( \phi -\psi \right) =-\left( m+m_{1} \right) glsin\phi \\[0mm]m_{1}l_{1}^{2}\ddot{\psi }+m_{1}ll_{1}cos\left( \phi -\psi \right) \ddot{\phi }-m_{1}ll_{1}\dot{\phi }^{2}sin\left( \phi -\psi \right) =-m_{1}gl_{1}sin\psi \end{array} \right. $$
$$ \left[ \begin{array}{@{\,} cc @{\, } }\left( m+m_{1} \right) l^{2} & m_{1}ll_{1}cos\left( \phi -\psi \right) \\[0mm] m_{1}ll_{1}cos\left( \phi -\psi \right) & m_{1}l_{1}^{2}\end{array} \right] \left[ \begin{array}{@{\,} c @{\, } } \ddot{\phi } \\[0mm]\ddot{\psi }\end{array} \right] =\left[ \begin{array}{@{\,} c @{\, } }-m_{1}ll_{1}\dot{\psi }^{2}sin\left( \phi -\psi \right) -\left( m+m_{1} \right) glsin\phi \\[0mm]m_{1}ll_{1}\dot{\phi }^{2}sin\left( \phi -\psi \right) -m_{1}gl_{1}sin\psi\end{array} \right] $$
$$\left[ \begin{array}{@{\,} cc @{\, } }\left( m+m_{1} \right) l^{2} & m_{1}ll_{1}cos\left( \phi -\psi \right) \\[0mm]m_{1}ll_{1}cos\left( \phi -\psi \right) & m_{1}l_{1}^{2}\end{array} \right] ^{-1}=\displaystyle \frac{1}{m_{1}\left( m+m_{1} \right) l^{2}l_{1}^{2}-m_{1}^{2}l^{2}l_{1}^{2}cos^{2}\left( \phi -\psi \right) }\left[ \begin{array}{@{\,} cc @{\, } }m_{1}l_{1}^{2} & -m_{1}ll_{1}cos\left( \phi -\psi \right) \\[0mm]-m_{1}ll_{1}cos\left( \phi -\psi \right) & \left( m+m_{1} \right) l^{2}\end{array} \right] $$
$$ \left[ \begin{array}{@{\,} c @{\, } }\ddot{\phi } \\[0mm]\ddot{\psi }\end{array} \right] =\displaystyle \frac{1}{m_{1}\left( m+m_{1} \right) l^{2}l_{1}^{2}-m_{1}^{2}l^{2}l_{1}^{2}cos^{2}\left( \phi -\psi \right) }\left[ \begin{array}{@{\,} cc @{\, } } m_{1}l_{1}^{2} & -m_{1}ll_{1}cos\left( \phi -\psi \right) \\[0mm]-m_{1}ll_{1}cos\left( \phi -\psi \right) & \left( m+m_{1} \right) l^{2} \end{array} \right] \left[ \begin{array}{@{\,} c @{\, } }-m_{1}ll_{1}\dot{\psi }^{2}sin\left( \phi -\psi \right) -\left( m+m_{1} \right) glsin\phi \\[0mm]m_{1}ll_{1}\dot{\phi }^{2}sin\left( \phi -\psi \right) -m_{1}gl_{1}sin\psi\end{array} \right] $$
$$=\displaystyle \frac{1}{m_{1}\left( m+m_{1} \right) l^{2}l_{1}^{2}-m_{1}^{2}l^{2}l_{1}^{2}cos^{2}\left( \phi -\psi \right) }\left[ \begin{array}{@{\,} c @{\, } }-m_{1}^{2}ll_{1}^{3}\dot{\psi }^{2}sin\left( \phi -\psi \right) -m_{1}\left( m+m_{1} \right) gll_{1}^{2}sin\phi -m_{1}^{2}l^{2}l_{1}^{2}\dot{\phi }^{2}cos\left( \phi -\psi \right) sin\left( \phi -\psi \right) +m_{1}^{2}gll_{1}^{2}cos\left( \phi -\psi \right) sin\psi \\[0mm]m_{1}^{2}l^{2}l_{1}^{2}\dot{\psi }^{2}cos\left( \phi -\psi \right) sin\left( \phi -\psi \right) +m_{1}\left( m+m_{1} \right) gl^{2}l_{1}cos\left( \phi -\psi \right) sin\phi + \sqcap - m_{1}\left( m+m_{1} \right) l^{3}l_{1}\dot{\phi }^{2}sin\left( \phi -\psi \right) -m_{1}\left( m+m_{1} \right) gl^{2}l_{1}sin\psi\end{array} \right] $$
$$\left[ \begin{array}{@{\,} c @{\, } }\dot{\phi }(n+1) \\[0mm]\dot{\psi }(n+1)\end{array} \right] =\left[ \begin{array}{@{\,} c @{\, } }\dot{\phi }(n) \\[0mm]\dot{\psi }(n)\end{array} \right] +\left[ \begin{array}{@{\,} c @{\, } }\ddot{\phi }(n) \\[0mm]\ddot{\psi}(n)\end{array} \right] \mit\Delta t$$
$$ \left[ \begin{array}{@{\,} c @{\, } } \phi (n+1) \\[0mm] \psi (n+1) \end{array} \right] =\left[ \begin{array}{@{\,} c @{\, } } \phi (n) \\[0mm] \psi (n) \end{array} \right] +\left[ \begin{array}{@{\,} c @{\, } } \dot{\phi }(n) \\[0mm] \dot{\psi }(n) \end{array} \right] \mit\Delta t $$
$$\displaystyle \frac{E'}{E}=\displaystyle \frac{1}{1+\alpha (1-cos\theta )}$$
$$\alpha =\displaystyle \frac{E}{m_{0}c^{2 } }$$
クラインー仁科
$$\displaystyle \frac{d\sigma }{d\mit\Omega }=\displaystyle \frac{r_{0 } }{2}\left( \displaystyle \frac{E'}{E} \right) ^{2}\left( \displaystyle \frac{E'}{E}+\displaystyle \frac{E}{E'}-sin^{2}\theta \right) $$
$$E_{e}=E-E'=E\displaystyle \frac{\alpha (1-cos\theta )}{1+\alpha (1-cos\theta )}$$
$$\displaystyle \frac{d\sigma }{dE_{e } }=\displaystyle \frac{d\sigma }{d\mit\Omega }\displaystyle \frac{d\mit\Omega }{d\theta }\displaystyle \frac{d\theta }{dE_{e } }$$
$$ d\mit\Omega =2\pi sin\theta d\theta , \displaystyle \frac{d\mit\Omega }{d\theta }=2\pi sin\theta $$\
$$\displaystyle \frac{dE_{e } }{d\theta }=E\displaystyle \frac{\alpha sin\theta }{\left[ 1+\alpha \left( 1-cos\theta \right) \right] ^{2 } }$$
$$\displaystyle \frac{d\sigma }{dE_{e } }=\displaystyle \frac{d\sigma }{d\mit\Omega }2\pi sin\theta \displaystyle \frac{\left[ 1+\alpha \left( 1-cos\theta \right) \right] ^{2 } }{E\alpha sin\theta }=\displaystyle \frac{\pi r_{0 } }{E\alpha }\left( 1+cos^{2}\theta \right) \left\{ 1+\displaystyle \frac{\alpha ^{2}\left( 1-cos\theta \right) ^{2 } }{\left( 1+cos^{2}\theta \right) \left[ 1+\alpha \left( 1-cos\theta \right) \right] } \right\} $$
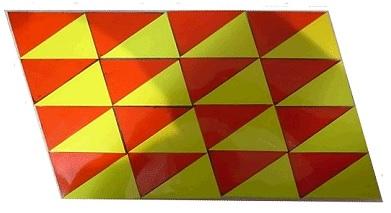
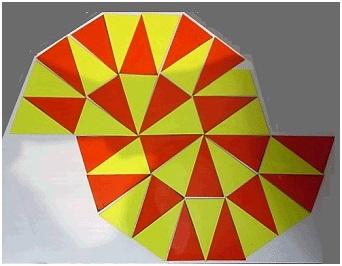
1種類の形(2等辺3角形)の赤色と黄色のタイル(赤タイルと黄タイルは互いに鏡像)で作ったタイル張り模様を鑑賞しましょう.1種類の形のタイルで,平面をタイル張りすると,必ず周期的なタイル張りになってしまうと思い込むのは間違っています.確かにFig.4,やFig.5のような周期的なタイリングはすぐ思いつきます.
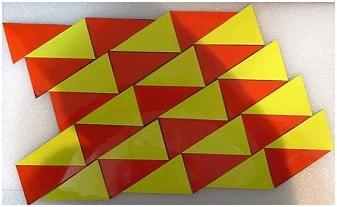
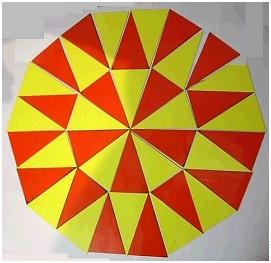
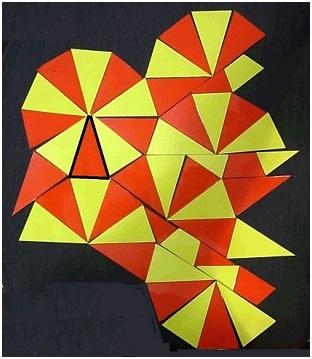
しかし,Fig.2やFig.3のように非周期なもので,平面をタイル張りするものがあります.Fig.2は中心に回転対称があるタイリング模様で,点群5mの対称性です.Fig.3は,2つの目がある螺旋パターンのタイリングで,水平線は映進面だと思うかもしれませんが,このパターンには周期がありませんから映進操作はできません.
螺旋の目の中間に対称心があります.
さて,ここで万華鏡で作られるタイリング模様Fig.1の登場です.
この万華鏡を生む3枚の鏡は1つの頂点では点群を生成しますが,他の2つの頂点では点群を生成しません.従って平面を赤と黄色の市松模様で埋めることはありません.全体の代数系は,群より緩いもの(特殊な亜群)になってしまいますから非常に複雑です.
対称操作は局所的で,独自の作用域と値域があり興味深いものです.
作用域,値域の制限のために,一つのタイル全体が無傷で写像されるパターン内の位置と,部分が写像される位置があり,このような複雑なタイリング模様ができます.
シュロ縄で柵の竹竿を結びました.庭師は男結びと言う方法で結ぶそうですが,私は簡単にランニング・ノットという方法で結びました.実は,シュロ縄の扱いが大変だったので,一番作業の楽な結び方をして,後でこの結び方の名前を調べたら,ランニング・ノットという方法であることがわかりました.
ランニング・ノット(あるいは,スリップ・ノット)と言われる所以は,竹竿を通してから紐を引っ張って締めると結節ノットが移動して,自然に竹竿の周りの輪が締まるからです.結節になる輪から紐の両端が同じ方向に出ていますから,竹竿を通してから紐の一端を引っ張ると,輪が締り結節になると同時に,他端も同方向に引かれるので,両側から輪を締め,自分自身を締め緩みを防止しする一番シンプルな結び方になります.
ランニング・ノットの結び方で紐の両側を引っ張ると,輪の中に竹竿がなければ手品のように紐は結び目が出来ずに解けてしまいます.比較のために,もやい結びを見てみると,結びの両側を引っ張ると結節ノットは移動せず輪が出来てしまい,竹竿の周りを締める結び方にはなりませんし,竹竿がない状態で,もやい結びの紐の両側を引っ張ると解けずに固定した輪を残して結び目が出来てしまいます.
紐の始まりを竹竿の周りのランニング・ノットから始めて,柵を組んだ竹竿に巻きつけ固定し,紐の最後もランニング・ノットで収めようとするとなかなか難しい.巻いてきたひもが緩まないように締めながら出口の結節になる結び目を作る必要があるからです.
シュロ縄は水に湿らせた方がしなやかでよく締まります.シュロ縄を繰り返ししごいていると,縄に毛玉のような塊や細い箇所ができますから注意しましょう.
今回は,紐の両端をそれぞれ別の場所で固定したので,使いませんでしたが”かます結び”という方法もあります.これは紐の両端を結ぶ結び方です.




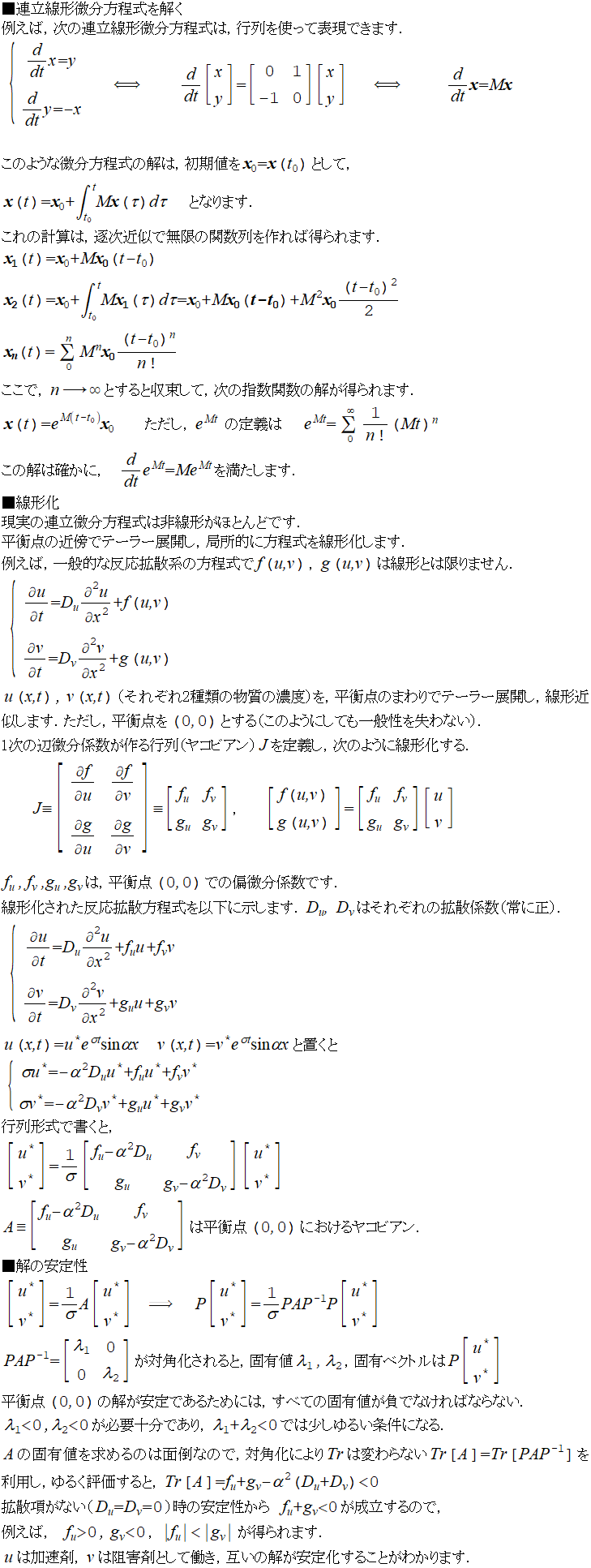
■連立線形微分方程式を解く
例えば,次の連立線形微分方程式は,行列を使って表現できます.
$$ \left\{ \begin{array}{@{\,} c @{\, } } \displaystyle \frac{d}{dt}x=y \\[0mm] \displaystyle \frac{d}{dt}y=-x \end{array} \right. $$
$$ \displaystyle \frac{d}{dt}\left[ \begin{array}{@{\,} c @{\, } } x \\[0mm] y \end{array} \right] =\left[ \begin{array}{@{\,} cc @{\, } } 0 & 1 \\[0mm] -1 & 0 \end{array} \right] \left[ \begin{array}{@{\,} c @{\, } } x \\[0mm] y \end{array} \right] \Longleftrightarrow \displaystyle \frac{d}{dt}\vec{x }=M\vec{x } \\ $$
このような微分方程式の解は,初期値を $$\vec{x_{0} } =\vec{x }(t_{0})$$ として,
$$ \vec{x}(t)=\vec{x }_{0}+\displaystyle \int_{t_{0 } }^{t}M\vec{x}(\tau )d\tau $$ となります.
これの計算は,逐次近似で無限の関数列を作れば実行できます.
$$\vec{x_{1 } }(t)=\vec{x}_{0}+M\vec{x_{0 } }(t-t_{0})$$
$$\vec{x_{2 } }(t)=\vec{x}_{0}+\displaystyle \int_{t_{0 } }^{t}M\vec{x_{1 } }(\tau )d\tau =\vec{x}_{0}+M\vec{x_{0 } }(t-t_{0 } )+M^{2}\vec{x_{0 } }\displaystyle \frac{(t-t_{0})^{2 } }{2}$$
$$\vec{x_{n } }(t)=\displaystyle \sum_{0}^{n}M^{n}\vec{x_{0 } } \displaystyle \frac{(t-t_{0})^{n } }{n!}$$
ここで,$$n \longrightarrow \infty $$とすると収束して,次の指数関数の解が得られます.
$$\vec{x }(t)=e^{M\left( t-t_{0} \right) }\vec{x}_{0}$$ ただし,$$e^{Mt} $$の定義は $$e^{Mt}=\displaystyle \sum_{0}^{ \infty }\displaystyle \frac{1}{n!}(Mt)^{n}$$
この解は確かに, $$\displaystyle \frac{d}{dt}e^{Mt}=Me^{Mt}$$を満たします.
■線形化
現実の連立微分方程式は非線形がほとんどです.
平衡点の近傍でテーラー展開し,局所的に方程式を線形化します.
例えば,一般的な反応拡散系の方程式で$$f(u,v),g(u,v)$$は線形とは限りません.
$$ \left\{ \begin{array}{@{\,} c @{\, } } \displaystyle \frac{ \partial u}{ \partial t}=D_{u}\displaystyle \frac{ \partial ^{2}u}{ \partial x^{2 } }+f(u,v) \\[0mm] \displaystyle \frac{ \partial v}{ \partial t}=D_{v}\displaystyle \frac{ \partial ^{2}v}{ \partial x^{2 } }+g(u,v) \end{array} \right. $$
$$u(x,t), v(x,t)$$(それぞれ2種類の物質の濃度)を,平衡点のまわりでテーラー展開し,線形近似します.ただし,平衡点を$$(0,0)$$とする(このようにしても一般性を失わない).
1次の偏微分係数が作る行列(ヤコビアン)$$J$$を定義し,次のように線形化する.
$$ J \equiv \left[ \begin{array}{@{\,} cc @{\, } } \displaystyle \frac{ \partial f}{ \partial u} & \displaystyle \frac{ \partial f}{ \partial v} \\[0mm] \displaystyle \frac{ \partial g}{ \partial u} & \displaystyle \frac{ \partial g}{ \partial v} \end{array} \right] \equiv \left[ \begin{array}{@{\,} cc @{\, } } f_{u} & f_{v} \\[0mm] g_{u} & g_{v} \end{array} \right] $$, $$\left[ \begin{array}{@{\,} c @{\, } } f(u,v) \\[0mm] g(u,v) \end{array} \right] =\left[ \begin{array}{@{\,} cc @{\, } } f_{u} & f_{v} \\[0mm] g_{u} & g_{v} \end{array} \right] \left[ \begin{array}{@{\,} c @{\, } } u \\[0mm] v \end{array} \right] $$
$$f_{u} , f_{v} ,g_{u} ,g_{v}$$は,平衡点$$(0,0)$$での偏微分係数です.
線形化された反応拡散方程式を以下に示します.$$D_{u}, D_{v}$$はそれぞれの拡散係数(常に正).
$$ \left\{ \begin{array}{@{\,} c @{\, } } \displaystyle \frac{ \partial u}{ \partial t}=D_{u}\displaystyle \frac{ \partial ^{2}u}{ \partial x^{2 } }+f_{u}u+f_{v}v \\[0mm] \displaystyle \frac{ \partial v}{ \partial t}=D_{v}\displaystyle \frac{ \partial ^{2}v}{ \partial x^{2 } }+g_{u}u+g_{v}v \end{array} \right. $$
$$u(x,t)=u^{*}e^{\sigma t}\textrm{sin}\alpha x$$, $$v(x,t)=v^{*}e^{\sigma t}\textrm{sin}\alpha x$$ と置くと
$$ \left\{ \begin{array}{@{\,} c @{\, } } \sigma u^{*}=-\alpha ^{2}D_{u}u^{*}+f_{u}u^{*}+f_{v}v^{*} \\[0mm] \sigma v^{*}=-\alpha ^{2}D_{v}v^{*}+g_{u}u^{*}+g_{v}v^{*} \end{array} \right. $$
行列形式で書くと,
$$ \left[ \begin{array}{@{\,} c @{\, } } u^{*} \\[0mm] v^{*} \end{array} \right] =\displaystyle \frac{1}{\sigma }\left[ \begin{array}{@{\,} cc @{\, } } f_{u}-\alpha ^{2}D_{u} & f_{v} \\[0mm] g_{u} & g_{v}-\alpha ^{2}D_{v} \end{array} \right] \left[ \begin{array}{@{\,} c @{\, } } u^{*} \\[0mm] v^{*} \end{array} \right] $$
$$A \equiv \left[ \begin{array}{@{\,} cc @{\, } } f_{u}-\alpha ^{2}D_{u} & f_{v} \\[0mm] g_{u} & g_{v}-\alpha ^{2}D_{v} \end{array} \right] $$
は平衡点$$(0,0)$$におけるヤコビアン.
■解の安定性
$$ \left[ \begin{array}{@{\,} c @{\, } } u^{*} \\[0mm] v^{*} \end{array} \right] =\displaystyle \frac{1}{\sigma }A\left[ \begin{array}{@{\,} c @{\, } } u^{*} \\[0mm] v^{*} \end{array} \right] \Longrightarrow P\left[ \begin{array}{@{\,} c @{\, } } u^{*} \\[0mm] v^{*} \end{array} \right] =\displaystyle \frac{1}{\sigma }PAP^{-1}P\left[ \begin{array}{@{\,} c @{\, } } u^{*} \\[0mm] v^{*} \end{array} \right] $$
$$ PAP^{-1}=\left[ \begin{array}{@{\,} cc @{\, } } \lambda _{1} & 0 \\[0mm] 0 & \lambda _{2} \end{array} \right] $$
が対角化されると,固有値 $$\lambda _{1} , \lambda _{2}$$,固有ベクトルは $$P\left[ \begin{array}{@{\,} c @{\, } }u^{*} \\[0mm]v^{*}\end{array} \right] $$
平衡点 $$(0,0)$$ の解が安定であるためには,すべての固有値が負でなければならない.
$$\lambda _{1}<0,\lambda _{2}<0$$ が必要十分であり,$$\lambda _{1}+\lambda _{2}<0$$では少しゆるい条件になる.
$$A$$の固有値を求めるのは面倒なので,対角化により$$Tr$$は変わらない$$Tr[A]=Tr[PAP^{-1}]$$を利用し,ゆるく評価すると,$$Tr[A]=f_{u}+g_{v}-\alpha ^{2}(D_{u}+D_{v})<0$$
拡散項がない($$D_{u}=D_{v}=0$$)時の安定性から $$f_{u}+g_{v} < 0$$が成立するので,
例えば, $$f_{u}>0, g_{v}<0$$,$$\left| \begin{array}{@{\,} c @{\, } }f_{u}\end{array} \right| <\left| \begin{array}{@{\,} c @{\, } }g_{v}\end{array} \right| $$が得られます.
$$u$$は加速剤,$$v$$は阻害剤として働き,互いの解が安定化することがわかります.
正3角形であるための必要十分条件は「3つの内角すべて(すくなくとも2つの内角)60°」です.
図形の対称性から,内角の1つが60°であることを証明すれば済みます.
これは,補助線1本引けば自明です.
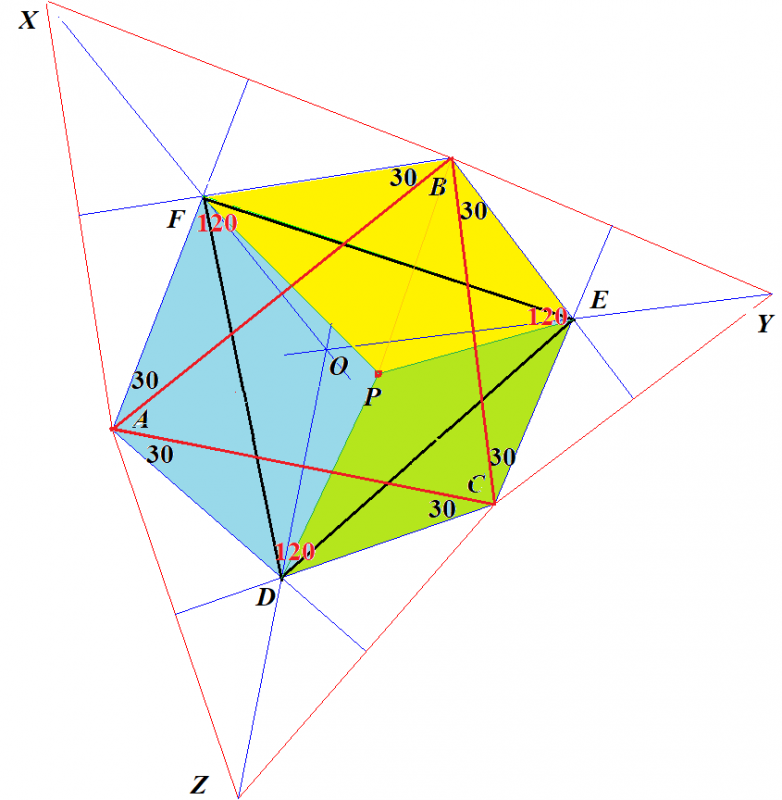
■さて,ここに出てきた6辺形には面白い性質があるのを見つけました.
この6辺形の中にある正3角形の中に点Pを中心になるように,正3角形の外の6辺形の部分を折り込むことができます.
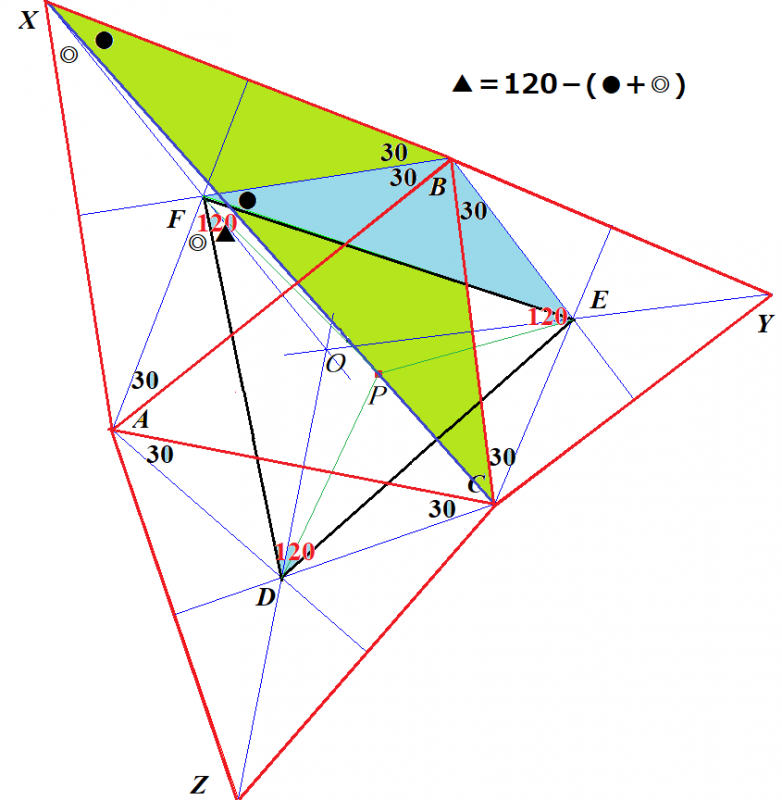
ナポレオンが発見したといわれるナポレオンの定理とは次のようなものです.
ナポレオンの定理
任意の⊿ABCの各辺上に正3角形を作図し,それら3つの正3角形の重心をD,E,Fとする.D,E,Fを結んでできる⊿DEFは正3角形である.
なかなか美しい形の定理ではありませんか,ナポオンの名を冠するのにふさわしい定理だと思います.ただし,ナポレオンが発見したかどうかは記録がなくわかりません.
ナポレオン (1769 -1821) は数学好きです.
陸軍幼年学校で,代数,三角法,幾何などを勉強し,数学で抜群の成績をおさめ,1784年にパリの陸軍士官学校に入学.数学が役に立つ砲兵科へと進みます.騎兵科,歩兵科でなく砲兵科に進んだのも戦術の時代の流れを見据えての決断でしょう.砲兵司令官,将軍,皇帝になりました.この時代にフランスには多くの数学者がいました.ラプラス,モンジュ,フーリエなどが近くにおり,エジプト遠征 (1798 年) にはモンジュやフーリエが同行しました.
ナポレオンは数学が大好き,このような幾何問題を考えるのが楽しみで,きっと定理を発見したのだと私は想像します.
証明
与えられた任意の3角形を⊿ABCとします.その各辺上に作図した正3角形のそれぞれの重心がD,E,Fです.
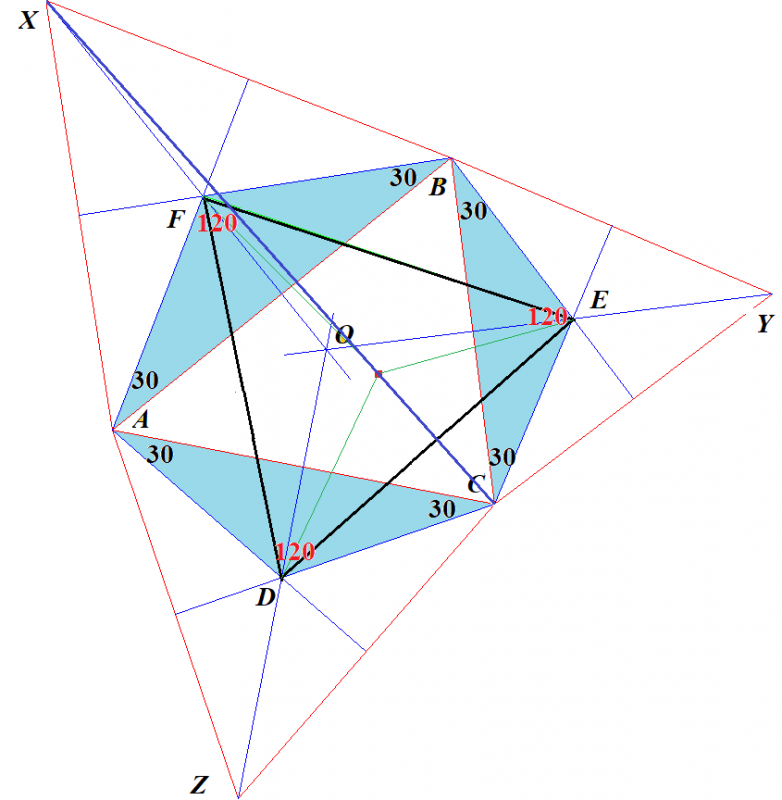
点Oは⊿ABCの垂心(⊿ABCのそれぞれの辺の垂直2等分線が交差する点)で,点D,E,Fは,この垂直2等分線上にあります.
色々な角の角度は図中に記入してあります.我々が証明すべきことは,⊿DEFが正3角形であることで,例えば,∠DFE=60を証明すれば済みます.考えてみてください.
ヒントは,∠BFE=∠BXC と ∠AFD=∠AXC を証明することです.
➡ 解答(証明)